
[Մոդել, HH-C-5K]
Ընդհանուր նկարագրությունը
Servo Press- ը AC Servo Motor- ով վարվող սարք է, որը փոխում է պտտվող ուժը ուղղահայաց ուղղությամբ բարձր ճշգրտությամբ գնդակի պտուտակով, վերահսկում եւ կառավարում է ճնշման դիրքը շարժիչով, ինչպես նաեւ ճնշում գործադրելու համար:
Այն կարող է ցանկացած պահի վերահսկել ճնշման / դադարեցման դիրքի / քշման արագությունը / դադարեցնել ժամանակը: Այն կարող է իրականացնել ուժի ճնշման ամբողջ գործընթացի փակ օղակի վերահսկողությունը ճնշման հավաքման գործողության մեջ սեղմելով. Հպման էկրանը բարեկամական մարդու համակարգչային ինտերֆեյսով ինտուիտիվ եւ հեշտ է գործել: Այն տեղադրված է անվտանգության լույսի վարագույրով: Եթե ձեռքի գործընթացում ձեռքը հասնում է տեղադրման տարածք, ապա տեղակտորը կդադարի տեղում ապահովելու անվտանգ շահագործում:
Եթե անհրաժեշտ է ավելացնել լրացուցիչ ֆունկցիոնալ կազմաձեւեր եւ չափի փոփոխություններ կամ նշել ապրանքանիշի այլ մասեր, գինը հաշվարկվելու է առանձին: Արտադրությունն ավարտվելուց հետո ապրանքները չեն վերադարձվի:
 Հիմնական տեխնիկական պարամետրեր
Հիմնական տեխնիկական պարամետրեր
Տեխնիկական պայմաններ. HH-C-5KN
| Press նշման ճշգրտության դաս | 1-ին մակարդակ |
| Առավելագույն ճնշում | 5kn |
| Ճնշման միջակայք | 50n-5kn |
| Նմուշների քանակը | Վայրկյանում 1000 անգամ |
| Առավելագույն ինսուլտ | 150 մմ (կարգավորելի) |
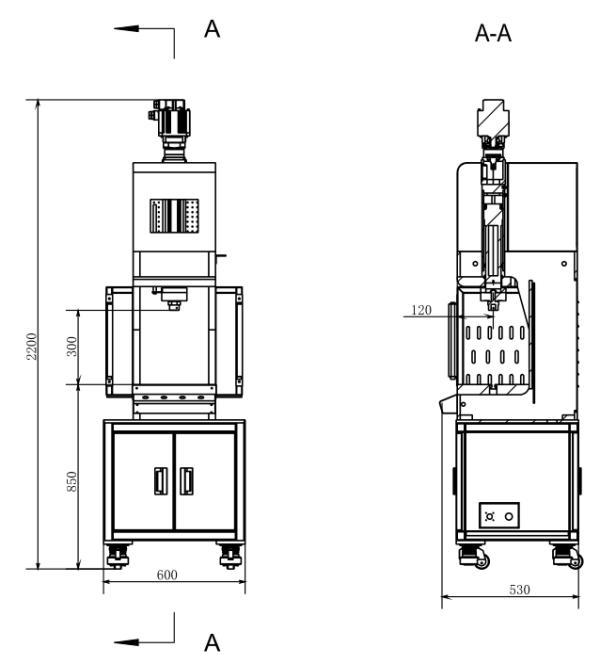
| Փակ բարձրություն | 300 մմ |
| Կոկորդի խորություն | 120 մմ |
| Տեղահանման լուծում | 0,001 մմ |
| Տեղորոշման ճշգրտություն | ± 0,01 մմ |
| Սեղմեք արագությունը | 0.01-35 մմ / վ |
| Ոչ-բեռի արագություն | 125 մմ / վ |
| Նվազագույն արագությունը կարող է դրվել | 0,01 մմ / վ |
| Ժամանակ պահելը | 0.1-150-ականներ |
| Ճնշման նվազագույն ժամանակ Կարող է դրվել | 0,1 հատ |
| Սարքավորումների հզորություն | 750W |
| Մատակարարման լարումը | 220V |
| Ընդհանուր հարթություն | 530 × 600 × 2200 մմ |
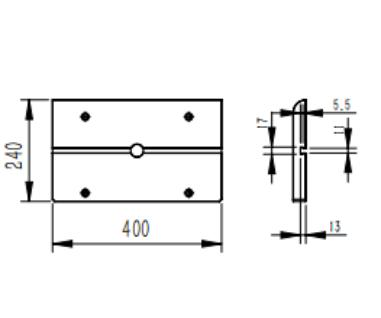
| Աշխատանքային սեղանի չափը | 400 մմ (ձախ եւ աջ), 240 մմ (առջեւի եւ հետեւի) |
| Քաշը մոտ է | 350 կգ |
| Անխոցի չափը եւ ներքին տրամագիծը | 20 մմ, 25 մմ խորությամբ |
Նկարչություն եւ հարթություն
T- ձեւավորված ակոսի չափերը աշխատապատի վրա
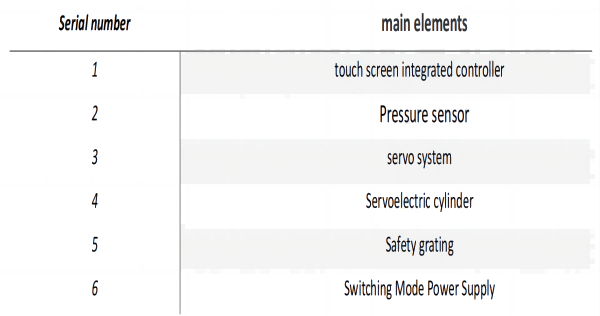
 Հիմնական համակարգի կազմաձեւում
Հիմնական համակարգի կազմաձեւում
 Համակարգի ծրագրաշարի հիմնական ինտերֆեյսը
Համակարգի ծրագրաշարի հիմնական ինտերֆեյսը
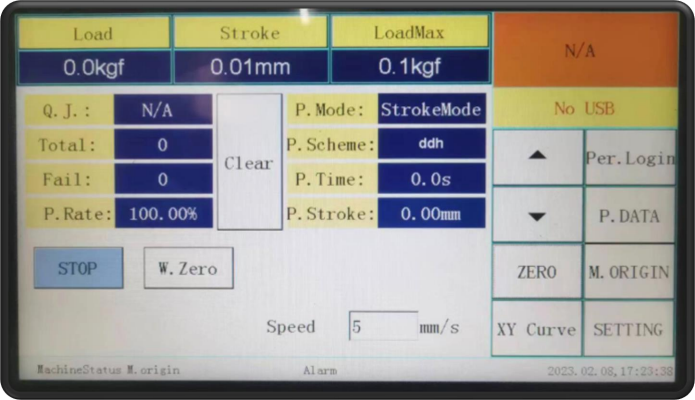
Հիմնական ինտերֆեյսը ներառում է ինտերֆեյսի ցատկման կոճակ, տվյալների ցուցադրում եւ ձեռնարկի շահագործման գործառույթներ: Կառավարում. Ներառման կրկնօրինակում, անջատում եւ մուտքի մեթոդի ընտրություն Անցնել ինտերֆեյսի սխեմայի: Պարամետրեր. Ներառյալ ցատկային միջերեսի միավորի եւ համակարգի պարամետրերը:
Զրո. Մաքրել բեռի ցուցիչների տվյալները:
Դիտեք `լեզվի պարամետր եւ գրաֆիկական ինտերֆեյսի ընտրություն:
Տեղեկատվություն. Տարբերակի տեղեկատվություն, սպասարկման ցիկլի պարամետր:
Թեստային պլան. Խմբագրել մամուլի տեղադրման եղանակը:
Redo A խմբաքանակ. Մաքրել մամուլի արդի տվյալները:
Արտահանման տվյալներ. Արտահանեք մամուլի արդի տվյալների բնօրինակ տվյալները:
Առցանց. Խորհուրդը սահմանում է հաղորդակցությունը ծրագրի հետ:
Ուժ. Իրական ժամանակի ուժի մոնիտորինգ:
Տեղափոխում. Իրական ժամանակի մամուլի դադարեցման դիրքը:
Առավելագույն ուժ. Հեղումների գործընթացում առաջացած առավելագույն ուժը:
Ձեռնարկի հսկողություն. Ավտոմատ շարունակական իջնում եւ աճում, աճում եւ իջնում; Փորձարկում
նախնական ճնշումը:
Սարքավորումների հատկություններ
1: Բարձր սարքավորումների ճշգրտություն. Կրկնվող դիրքի ճշգրտություն ± 0.01MM, ճնշման ճշգրտություն 0.5% FS
2. Ծրագիրը ինքնազարգացած է եւ հեշտ է պահպանել:
3. Տարբեր սեղմիչ ռեժիմներ. Ընտրովի ճնշման վերահսկում եւ դիրքի վերահսկում:
4. Համակարգն ընդունում է սենսորային էկրանի ինտեգրված վերահսկիչ, որը կարող է խմբագրել եւ պահպանել Formula ծրագրի սխեմաների 10 հավաքածուն, ցուցադրեք տեղահանման ճնշման ներկա կորը իրական ժամանակում եւ առցանց գրանցեք 50 կտոր մամուլի արդյունքի տվյալներ առցանց: Ավելի քան 50 կտոր տվյալների պահվում է, հին տվյալները ավտոմատ կերպով կվերանան (նշում. Տվյալները ավտոմատ կերպով մաքրվելու են էլեկտրաէներգիայի անբավարարությունից): Պատմական տվյալները պահպանելու համար սարքավորումները կարող են ընդլայնել եւ տեղադրել արտաքին USB ֆլեշ սկավառակ (8G, FA32 ձեւաչափի սահմաններում): Տվյալների ձեւաչափը xx.xlsx է
5. Ծրագրակազմն ունի ծրարի գործառույթ, որը կարող է սահմանել արտադրանքի բեռի միջակայքը կամ տեղահանման միջակայքը ըստ պահանջների: Եթե իրական ժամանակի տվյալները սահմանի սահմաններում չեն, սարքավորումները ինքնաբերաբար զարթուցիչ են:
6. Սարքավորումները հագեցած են անվտանգության քերուկով `օպերատորների անվտանգությունն ապահովելու համար:
7. իրականացրեք ճշգրիտ տեղահանման եւ ճնշման հսկողություն, առանց կոշտ սահմանի եւ հենվելով ճշգրիտ գործիքների վրա:
8. Առցանց հավաքների որակի կառավարման տեխնոլոգիան կարող է իրական ժամանակում հայտնաբերել թերի արտադրանքներ:
9. Ապրանքի հատուկ պահանջների համաձայն, նշեք սեղմման օպտիմալ գործընթացը:
10. Հատուկ, ամբողջական եւ ճշգրիտ գործառնական գործընթացի ձայնագրման եւ վերլուծության գործառույթներ:
11. Այն կարող է իրականացնել բազմակողմանի, ճկուն էլեկտրալարերի եւ հեռակառավարման սարքավորումների կառավարում:
12. Տվյալների բազմակի ձեւաչափերը արտահանվում են, Excel, Word, եւ տվյալները հեշտությամբ կարող են ներմուծվել SPC եւ այլ տվյալների վերլուծության համակարգեր:
13: Ինքնության ախտորոշում եւ էներգիայի ձախողում. Սարքավորումների ձախողման դեպքում Servo Press-Fitst Function- ը ցուցադրում է սխալի տեղեկատվություն եւ լուծումների հուշում, ինչը հարմար է խնդիրը արագ գտնել եւ լուծել:
14. Բազմաֆունկցիոնալ I / O կապի միջերես. Այս ինտերֆեյսի միջոցով կարելի է իրականացնել արտաքին սարքերի հետ շփումը, ինչը հարմար է ավտոմատացման ամբողջական ինտեգրման համար:
15. Ծրագրակազմը սահմանում է թույլտվության սահմանման բազմաթիվ գործառույթներ, ինչպիսիք են ադմինիստրատորը, օպերատորը եւ այլ թույլտվությունները:
Ծրագրեր
1. Ավտոմոբիլային շարժիչի, փոխանցման լիսեռի, ղեկի եւ այլ մասերի ճշգրիտ մամուլ
2: Էլեկտրոնային արտադրանքի ճշգրիտ մամուլը
3. Պատկերային տեխնոլոգիաների հիմնական բաղադրիչների ճշգրտության մամուլը
4: Շգրիտ մամուլների կիրառումը շարժիչային կրիչների կցամաս
5. Prec շգրիտ ճնշման հայտնաբերում, ինչպիսիք են գարնանային գործունեության թեստը
6. Ավտոմատ հավաքման գծի դիմում
7. Ավիատիեզերական հիմնական բաղադրիչների մամուլի դիմումը
8. Բժշկական եւ էլեկտրական գործիքների հավաքում եւ ժողով
9. Այլ առիթներ, որոնք պահանջում են ճշգրիտ ճնշման հավաքում
Փոստ -22-2023